|||PUBLICATIONS
Ataman, B., Gallardo, R., Doucatz, Q. Affective Translation: Soft Kinetic Textiles for Human–Robot Interaction. HCI International 2026. (in peer review). Ataman, B., Marom, L. COWO: A Tufted Coconut–Wool Composite for High-Performance Thermal and Acoustic Insulation. ICBMC 2026. Kwon, C., Ataman, B, Wang, Y., Ortiz, S., Paige, C., Hoffman, J., Tibbits, S. HAVEN: Deployable Emergency Re-Entry Capsule. IEEE Aerospace Conference, 2026. Mutis, S., Wan, W. L., Ataman, B., Suk, A., Li, J., & Farahi, B. InSituWear: On-Body Fabrication of Custom-Fit Wearables Using Melt-Drawn PCL Filaments. CHI 2026. Mutis, S. Ataman, B.Combinatorial Assembly Optimization: A Stock-Aware Multi-Objective Method for Discrete Multi-Material Structures. eCAADe 2026. (in peer review).
||| RESEARCH PROJECTS
HAVEN
2025
Keywords | Space Vehicles/ Habitats, Collabpsible Kinetic Strucutres
Team| Chris Kwon, Berfin Ataman, Shantelle Ortiz, Yuhan Wang
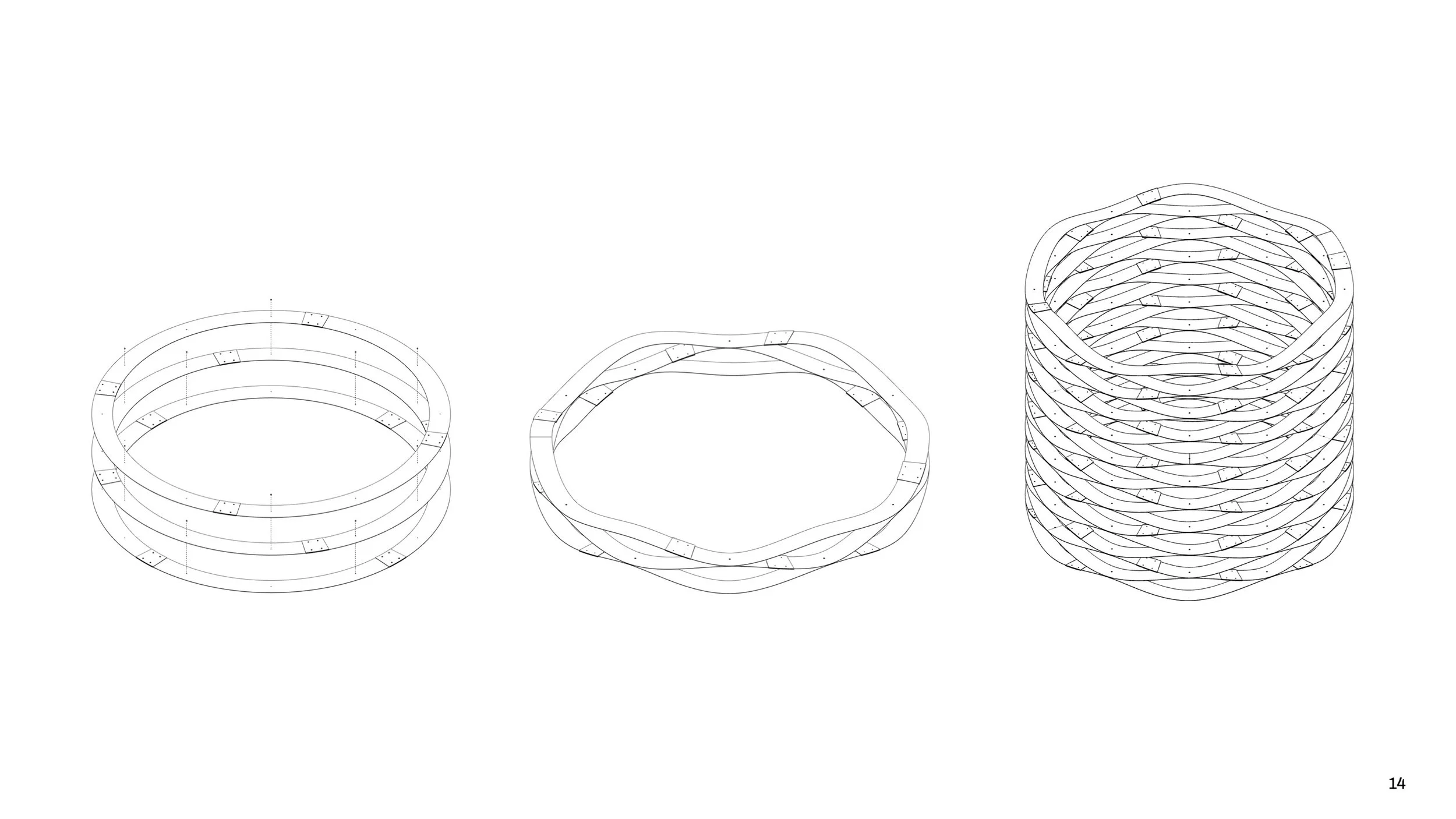
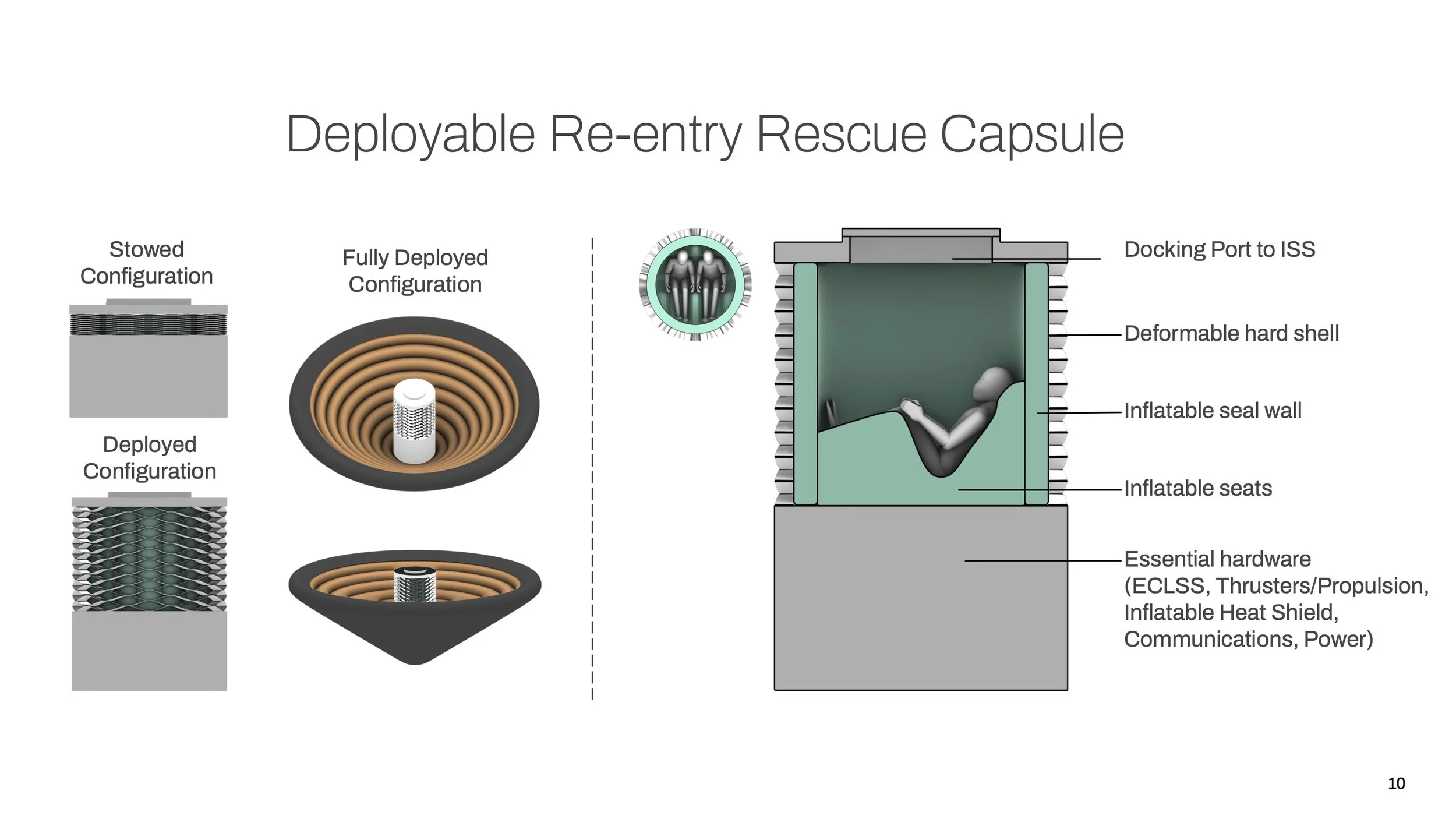
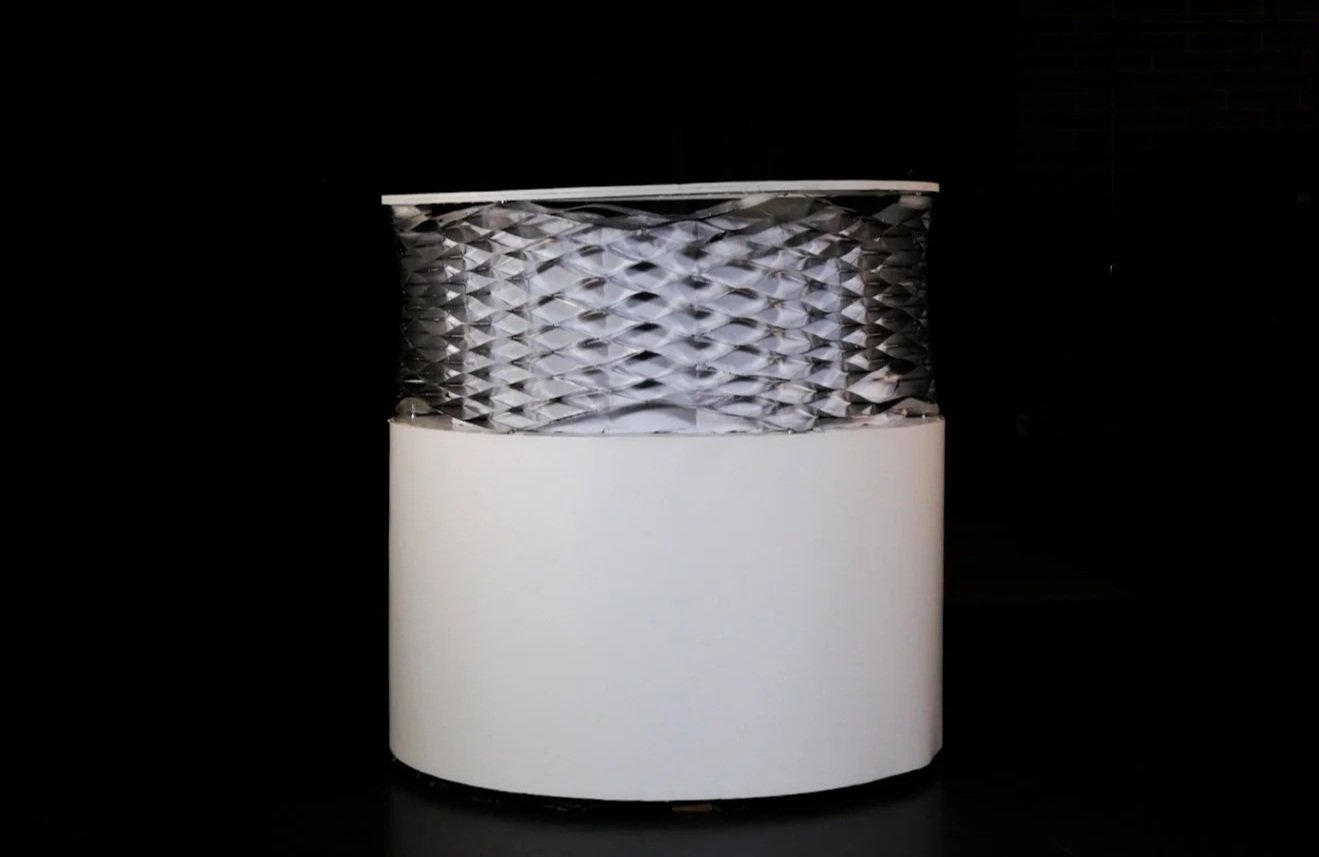
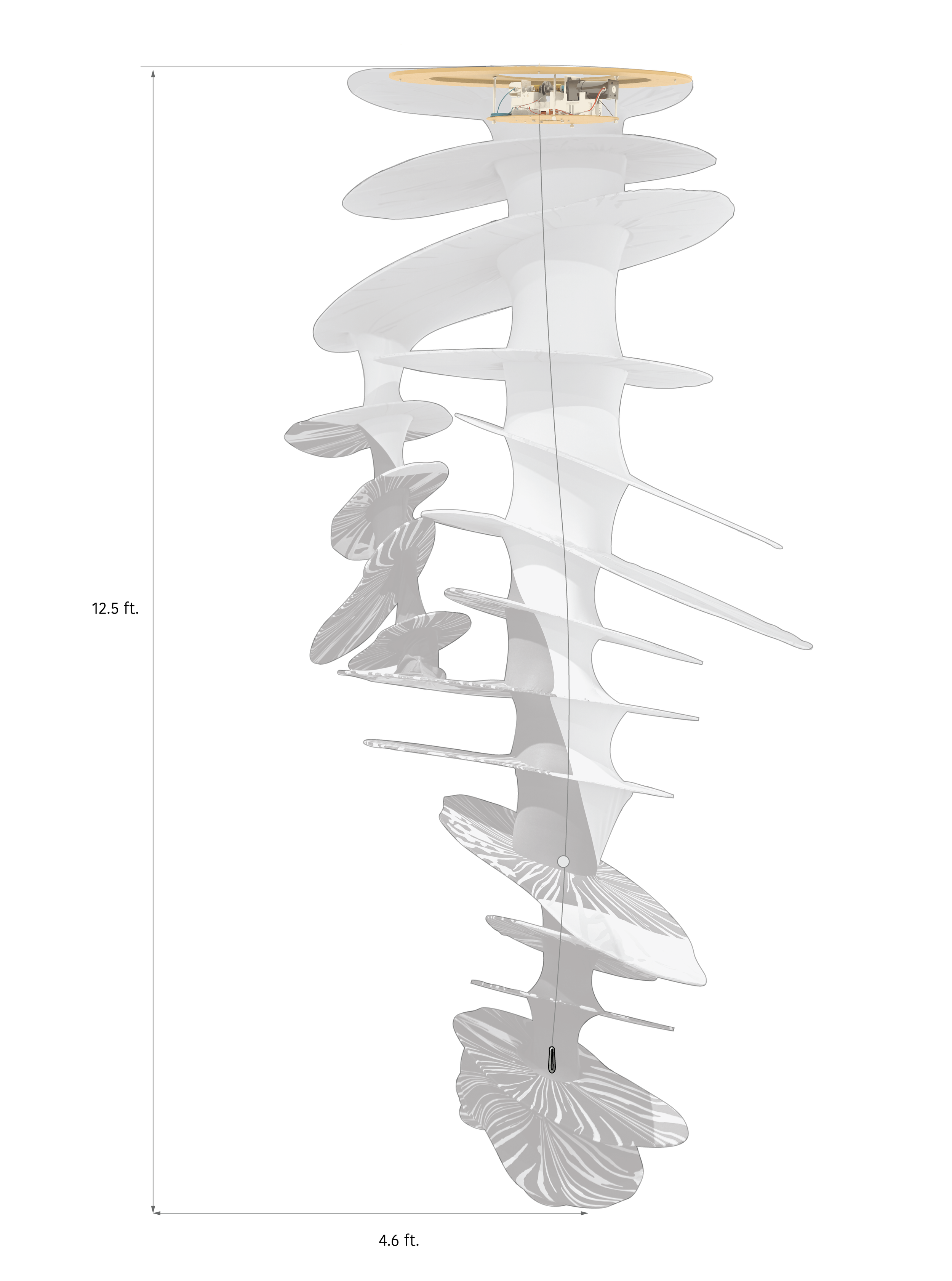
HAVEN proposes a stowable, inflatable capsule for emergency evacuation from the ISS. Current crewed vehicles are designed primarily for transport, not as dedicated lifeboats, leaving a critical gap in station-specific emergency systems. HAVEN addresses this by introducing a compact, modular re-entry capsule equipped with a deployable heat shield and hybrid rigid–soft structure. The system can be docked as a new module housing up to six emergency re-entry vehicles, providing immediate evacuation capability for an entire crew. Each capsule autonomously executes a high-velocity re-entry and controlled descent, enabling safe, rapid recovery in the event of fire, depressurization, or medical crisis. Working on this project deepened my interest in form finding under extreme environmental constraints—how collapsible and inflatable structures can achieve both spatial efficiency and mechanical integrity
Papers : Ataman, B., Ortiz, S., Kwon, C., Wang, Y. HAVEN: Stowable Inflatable Re-Entry Capsule — IEEE Aerospace Conference 2026


PROGRAMMABLE ASSEMBLY FOR DISASSEMBLY



-
My current thesis, Programmable Assembly for Disassembly, develops interfaces that allow multi-material assemblies to separate on command. The research classifies disassembly strategies into six categories: mechanical, chemical, structural, magnetic, and biological. This taxonomy combines existing and novel approaches. The goal is to make composite systems recyclable and reusable, addressing the problem that many multi-material products end up in landfills because their components cannot be separated.
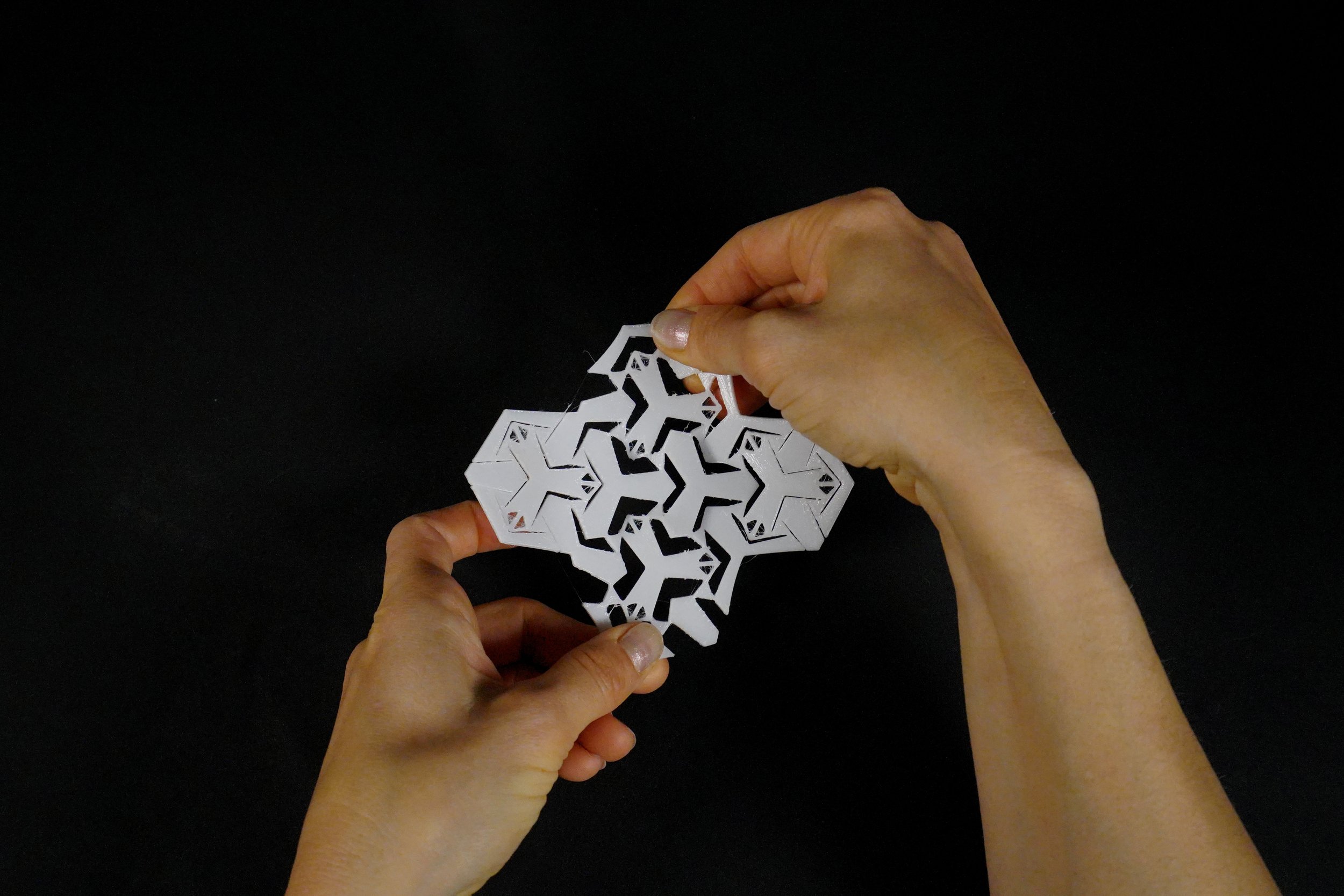
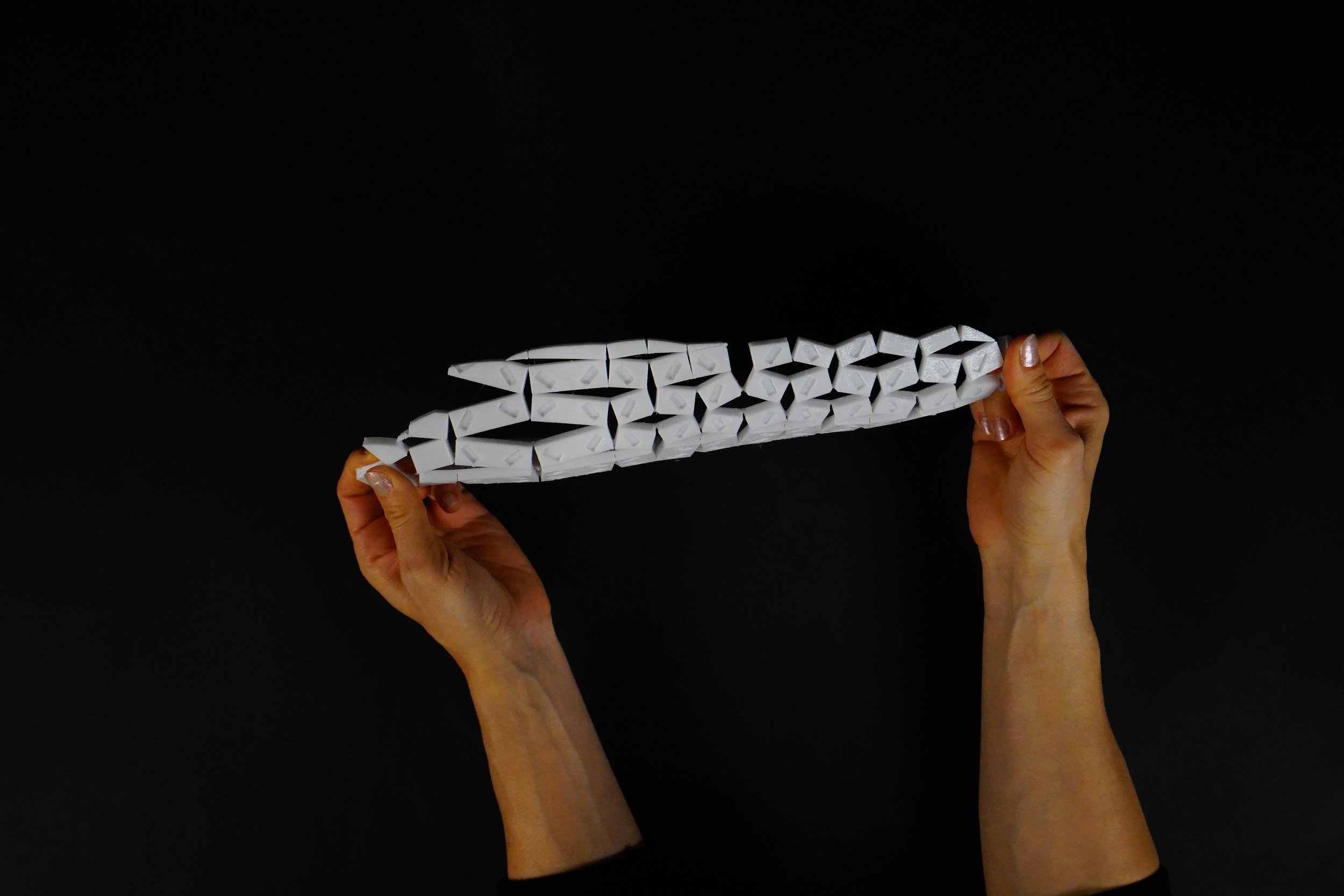
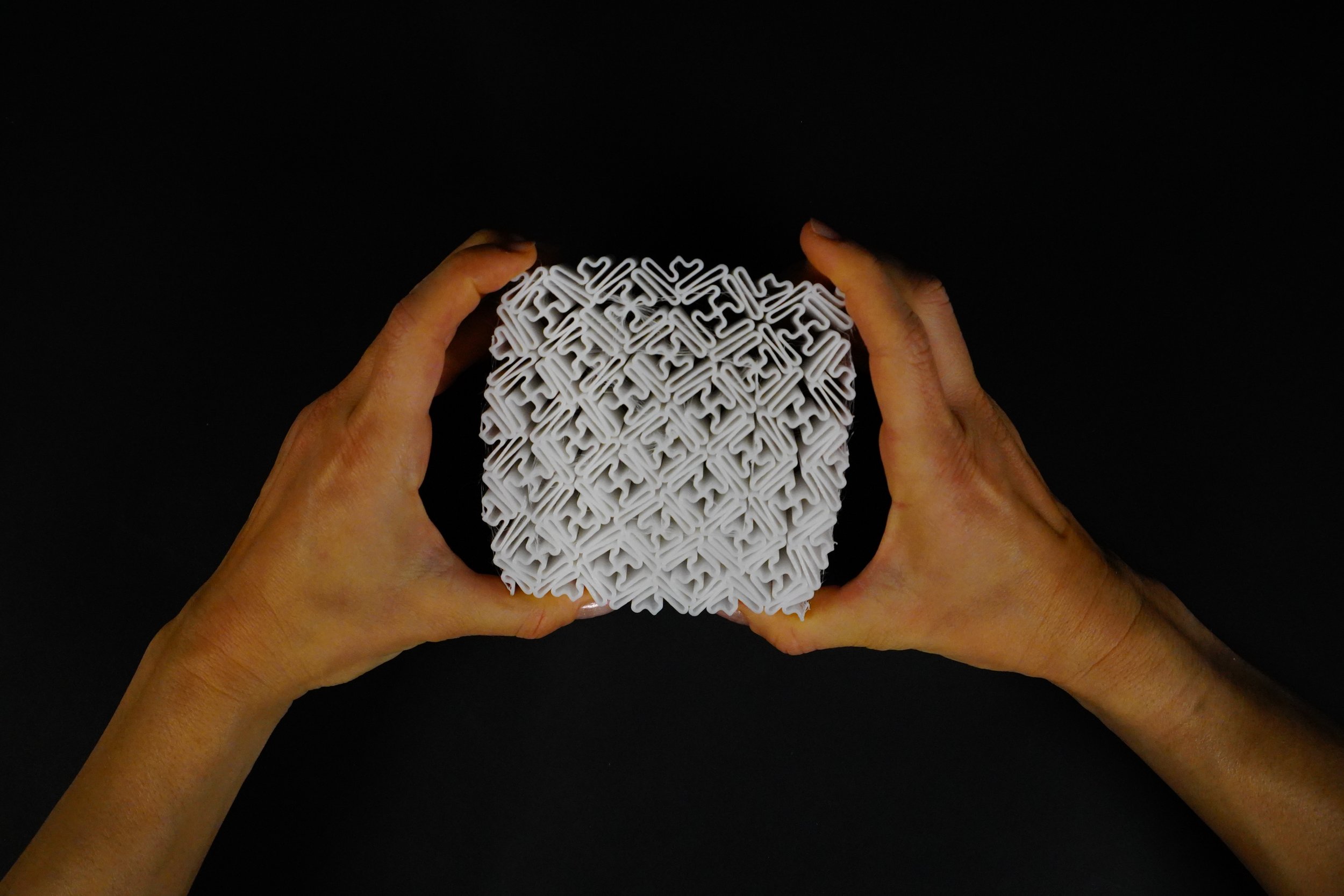
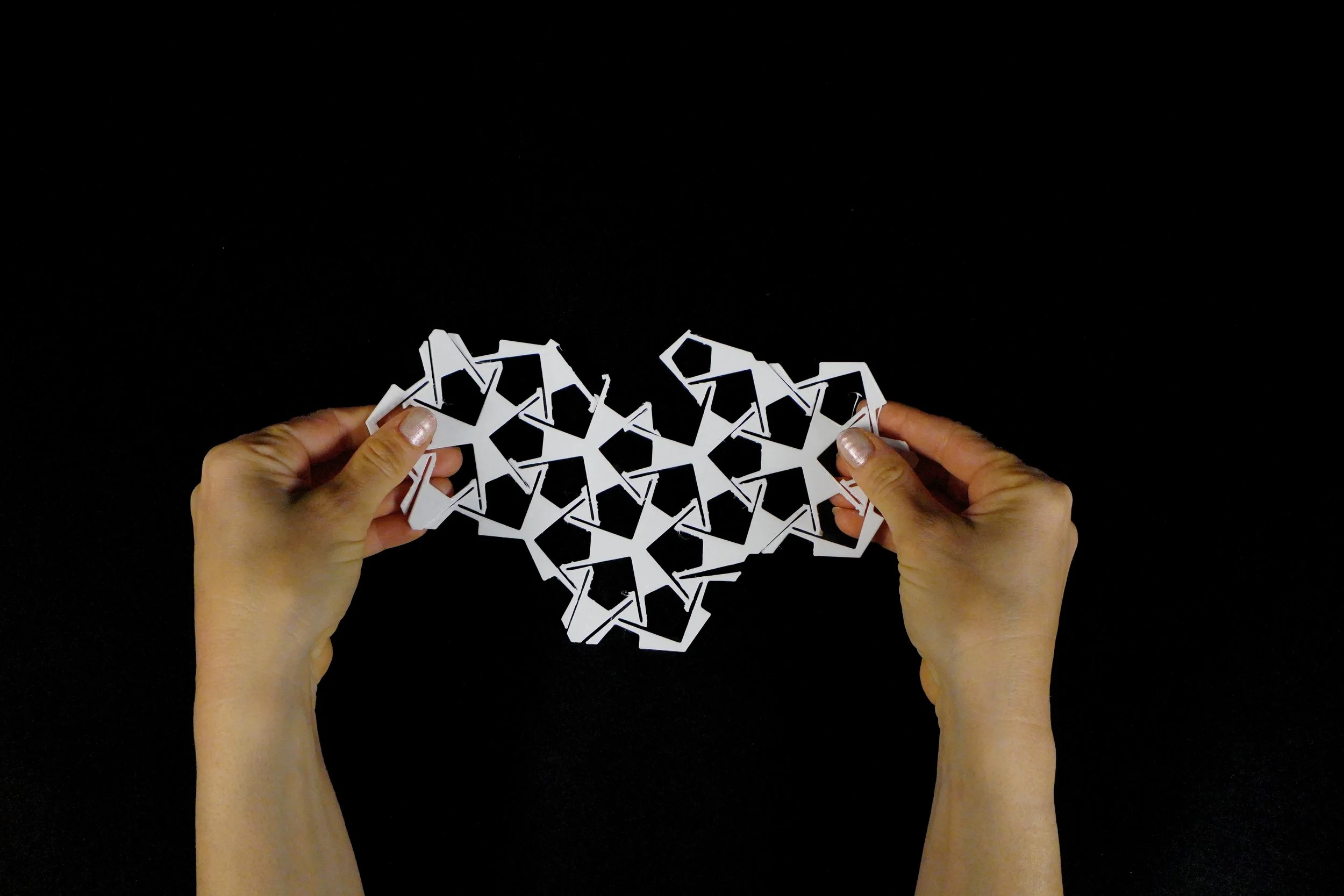
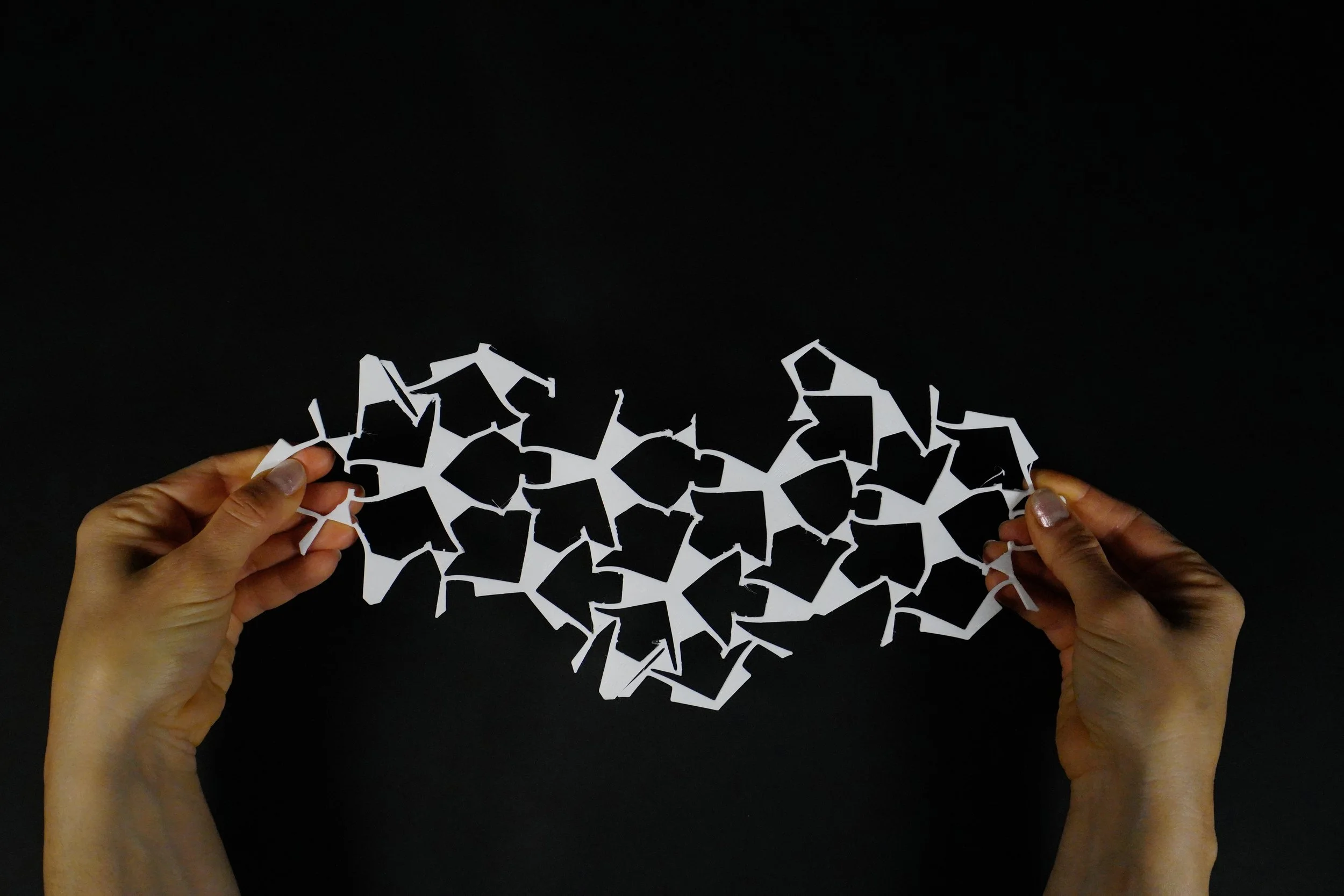
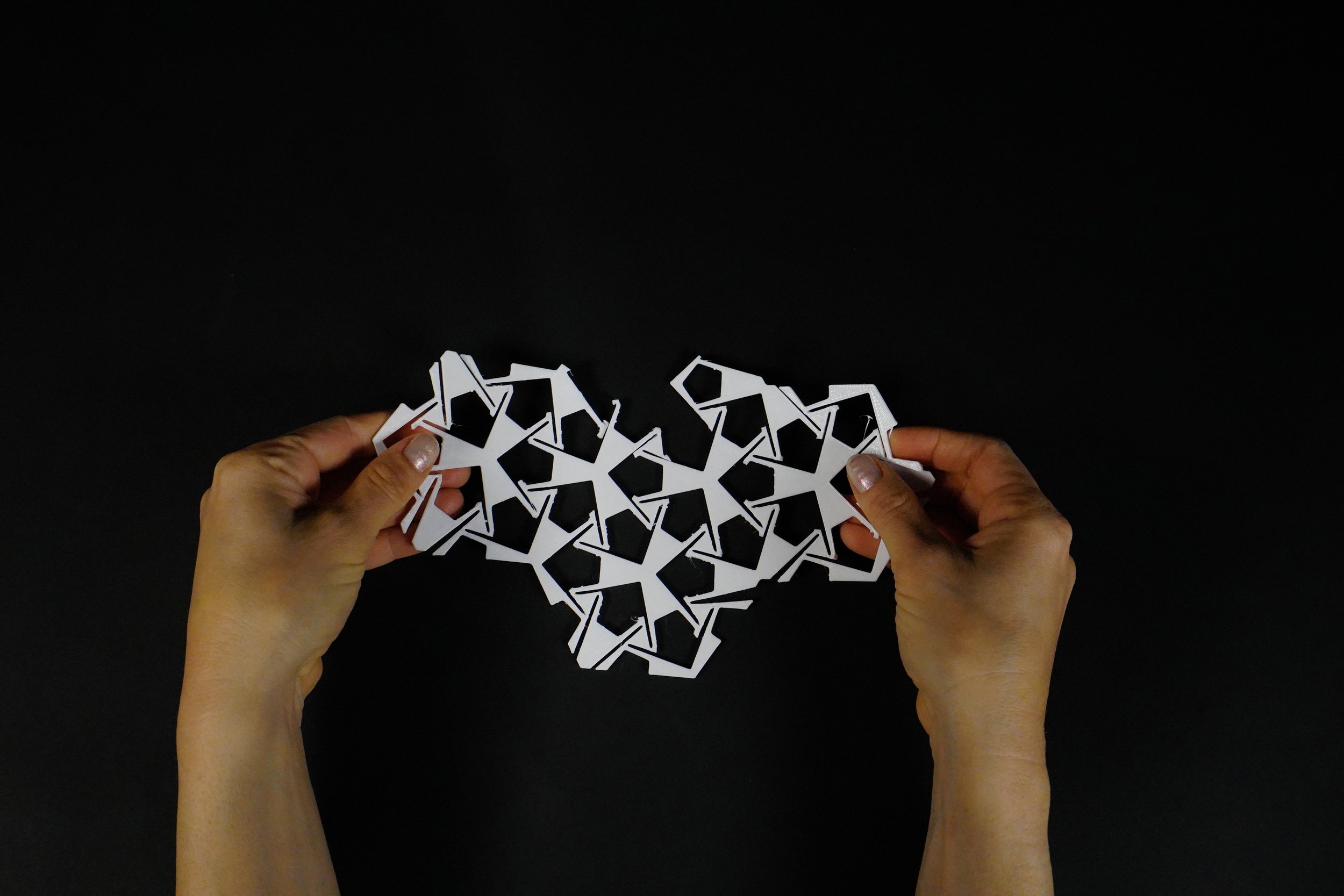
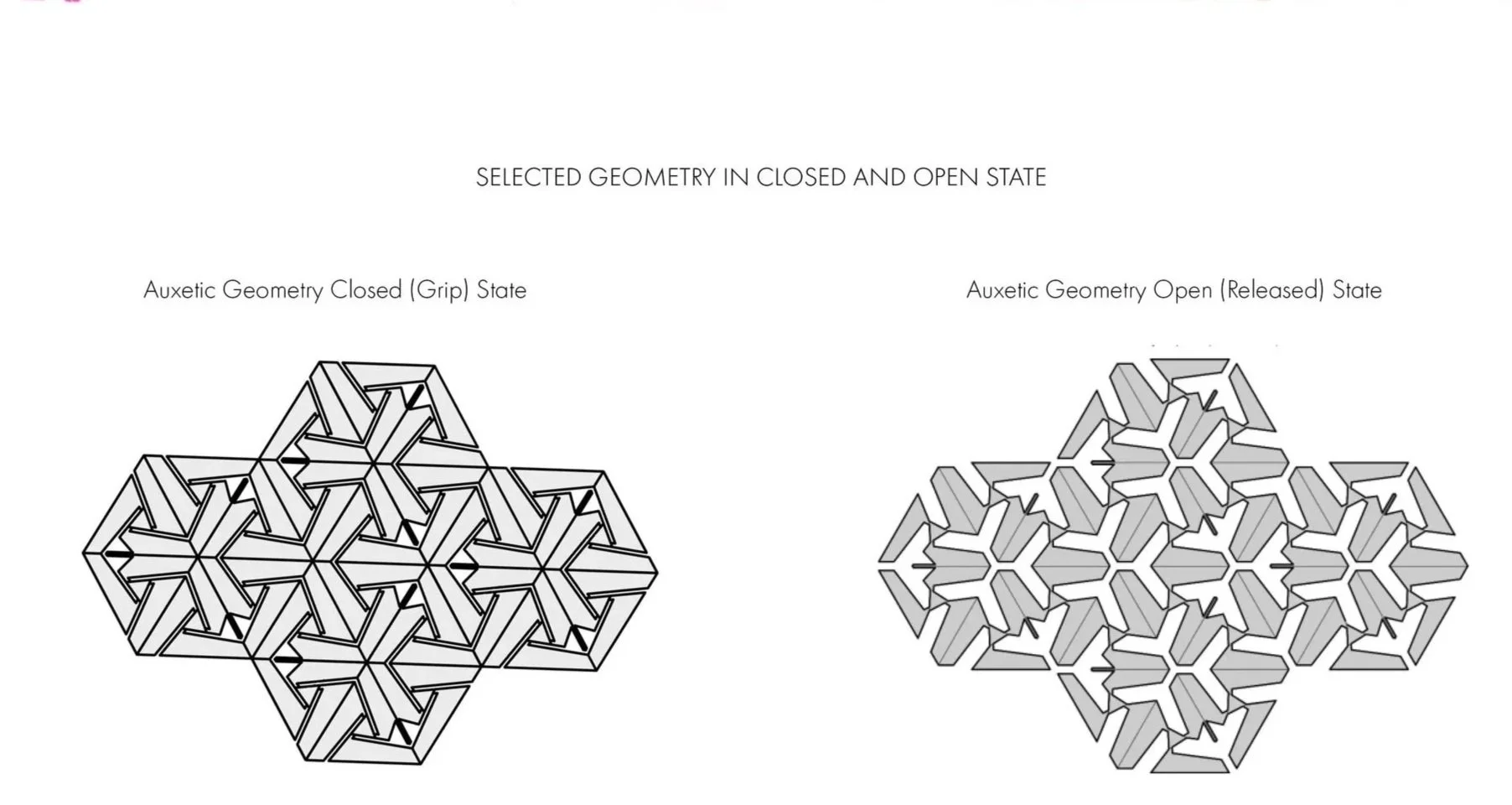
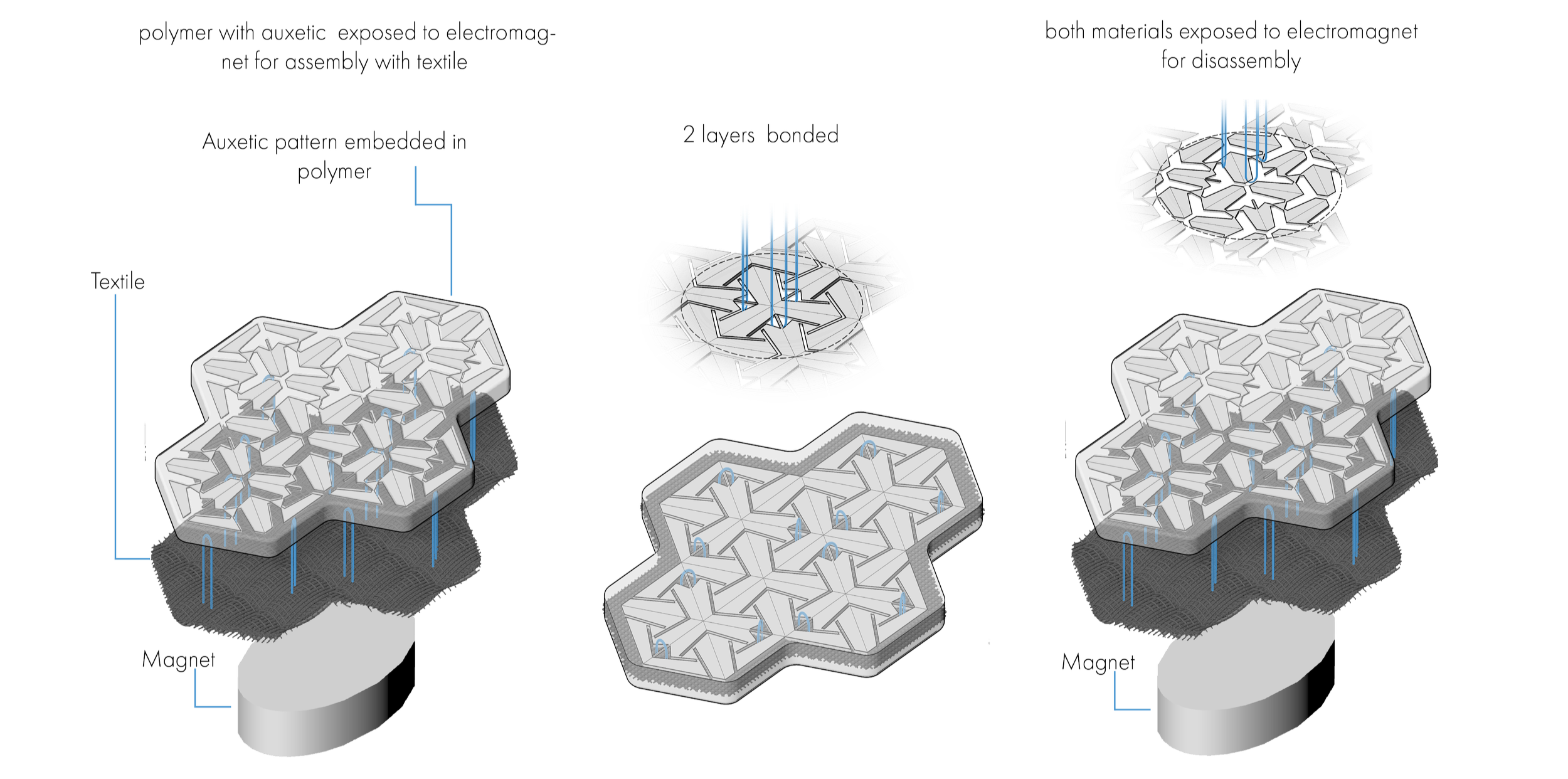
As a first step, I am working on magnetized auxetic geometries (structures that expand laterally when stretched horizontally) to create disassemblable joints. By varying the cell sizes of the auxetic patterns, I can generate adaptive, doubly curved surfaces that conform to complex geometries. The method involves casting a mixture of semi-soft polymers and initially unmagnetized NdFeB particles into auxetic geometries. These particles can be magnetized using external electromagnets and subsequently behave as permanent magnets. By controlling the direction of magnetization, I can program the auxetic geometries to respond to targeted magnetic fields. This work on magnetized auxetic structures builds on research from MIT and Stanford on reprogrammable magnetic activation methods used in medical micro robotics. My research scales up these prior experiments to serve as reversible joinery interfaces for multi-material assemblies—strong enough to remain stable under normal use, yet releasable when exposed to specific magnetic field patterns.
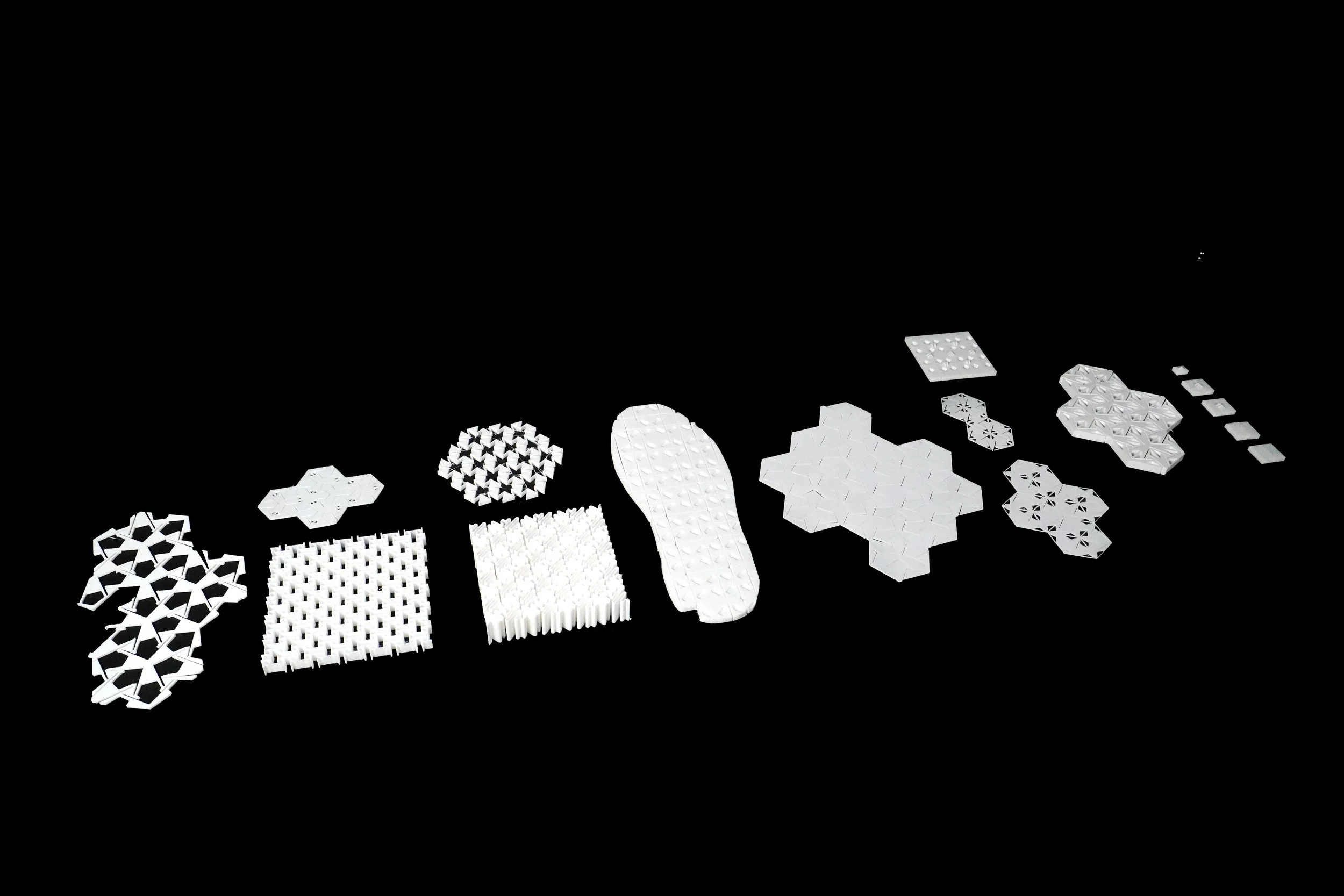
My first case study focuses on shoes, a major contributor to landfill waste, and exemplifies broader issues in textile assemblies, where components are often glued or stapled together, preventing disassembly and recycling. To address this, I explored a range of auxetic presentation geometries and developed a parametric workflow tailoring them as a joinery interface between knit textiles and the shoe sole.
In the future, I envision these disassembly methods being applicable to products well beyond the shoe case study. I aim to develop a computational design framework that integrates both assembly and disassembly as core design parameters, enabling reversible joints and separation mechanisms to be embedded within CAD workflows, allowing designers to prioritize circularity. While magnetic disassembly will not apply to all products, this case study represents one method within a broader taxonomy of disassembly strategies. Fully developing this taxonomy could reveal a set of broadly applicable methods for many products. Ultimately, this work reframes fabrication by accounting for both assembly and disassembly at the beginning of the design process, pairing programmable materials with computational tools to support circular, adaptable systems.
MAGNETIC ASSEMBLY & DISASSEMBLY FOR TEXTILES WITH POLYMERS
1) GEOMETRY EXPLORATION FOR INTERFACE
ASSEMBLY TESTS
Tests conducted for material assembly strategies between 3D prints and textiles.
MAGNET TESTS
The following magnet experiments were conducted using permanent magnets of equal strength embedded within 3D-printed structures.
2) MATERIAL FABRICATION
Textile was knitted with loops from elastic yarn and the auxetic geometry was 3D printed for tests. The geometry will be cast with NdFeB particles and embeded in semi- soft polymer for the later tests.
3)ACTIVATION MECHANISM
3) CASE STUDY: SHOES

2025
Keywords | Human-centered computing, Human–robot interaction
Team | Berfin Ataman, Rodrigo Gallardo, Qilmeg Doucatz
AFFECTIVE TRANSLATION
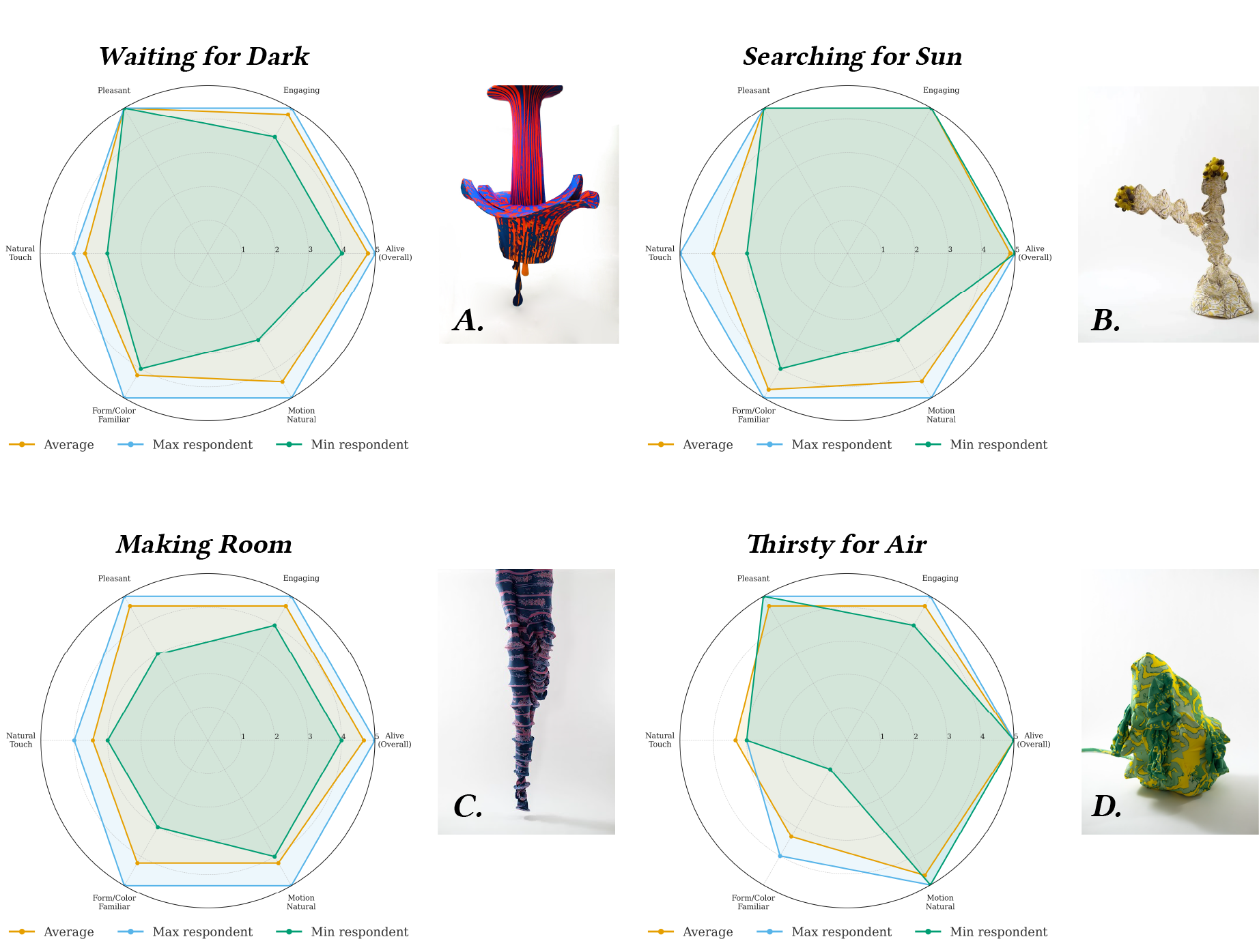
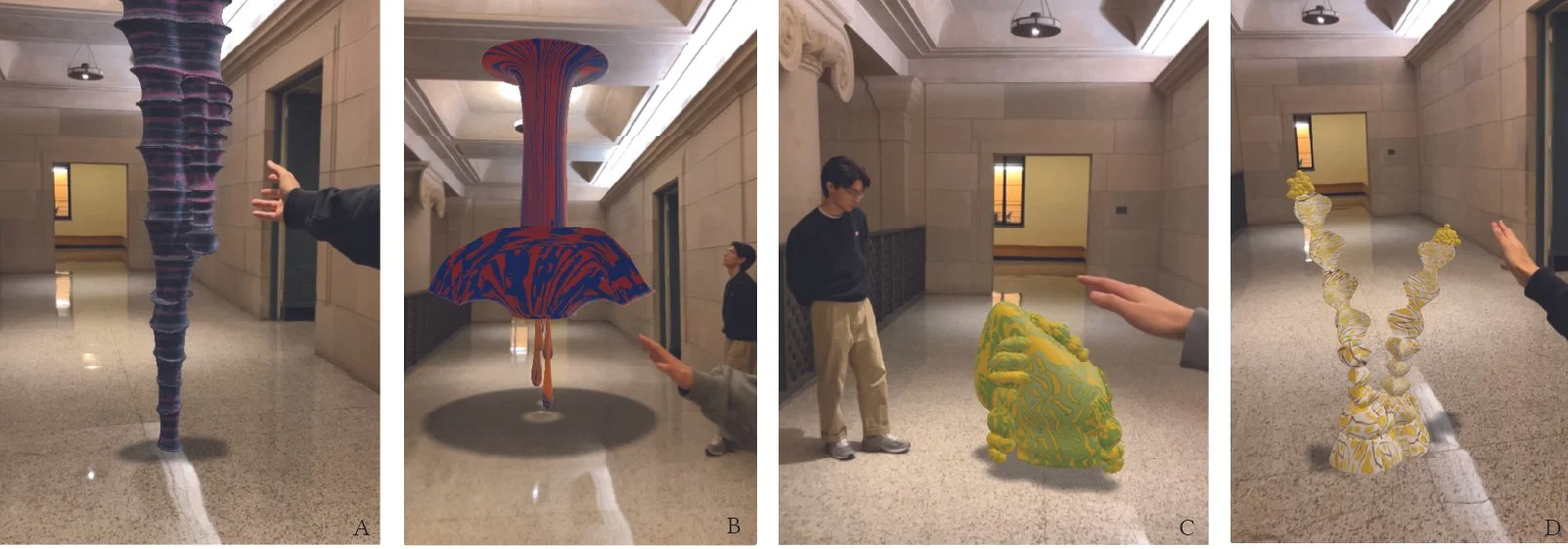
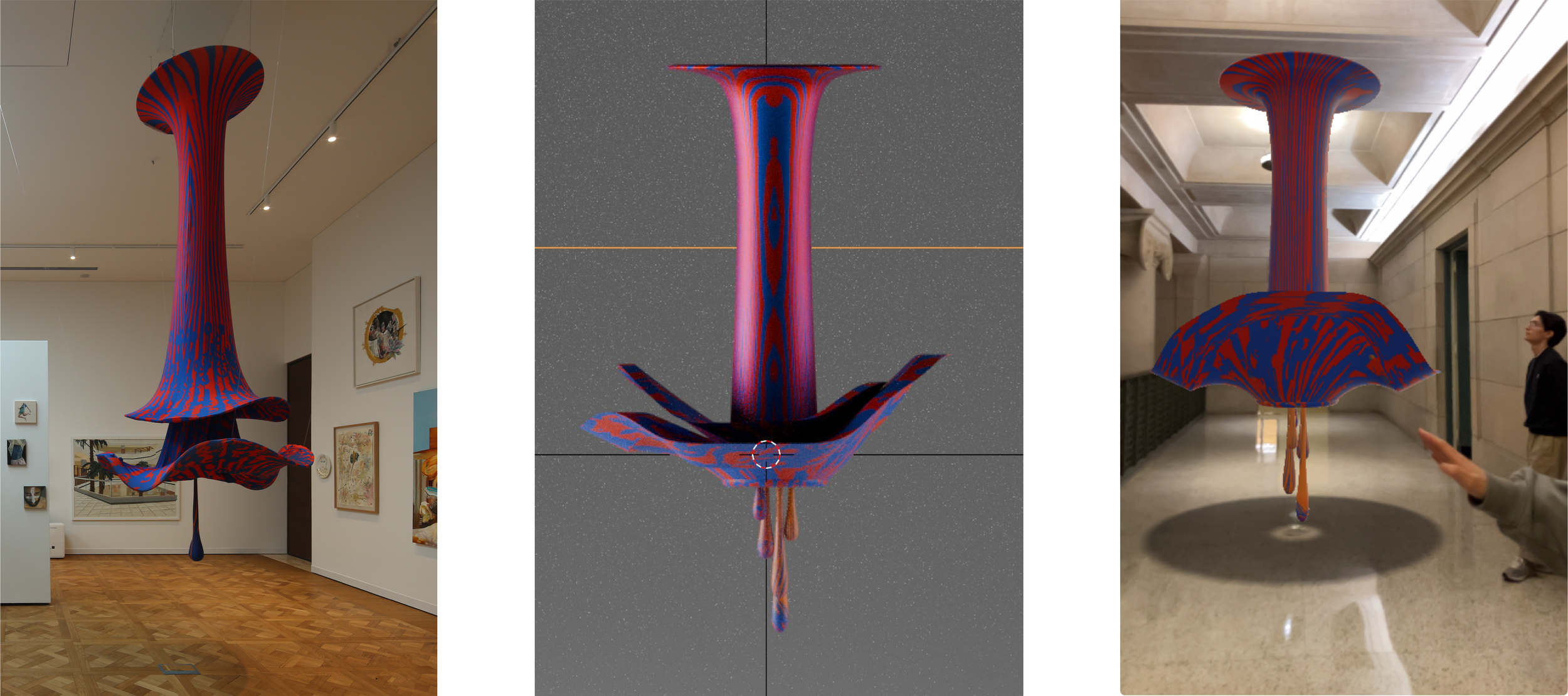
Affective Translation is a series of textile soft robots and their augmented-reality counterparts, which enable us to investigate how motion, material, and design impact emotional engagement. Each of the four textile robots features a soft outer structure with embedded actuation, motors, servos, and pneumatic chambers, all controlled via networked custom microcontrollers, to evoke natural rhythms such as breathing, stretching, and pulsing. The same motion data from the actuators in physical sculptures is used to drive the virtual models, allowing a direct comparison between physical and digital experiences. Participants interacted with either the physical or virtual systems and reported how qualities like liveliness, calmness, and curiosity were perceived across conditions.
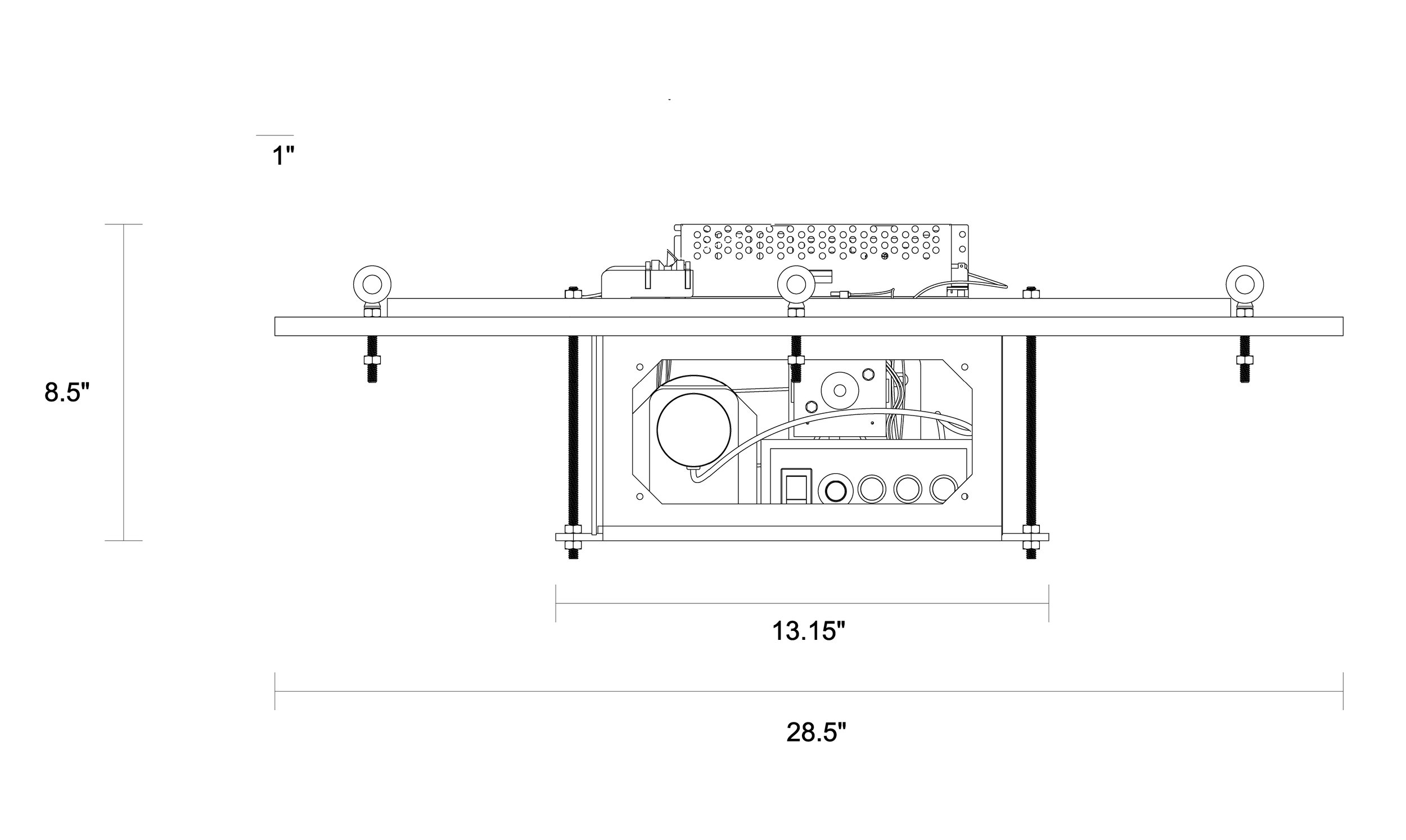
Each robot employs unique actuation systems (motors, spools, pneumatic chambers, or servos) controlled via microcontrollers and randomized timing, generating lifelike unpredictability. The AR twins are animated using recorded motion data, reproducing the same temporal signatures within a spatially aligned immersive environment.
Preliminary data from the physical installation show participants found the experience pleasant, natural, and alive, evoking calmness and curiosity. Future stages will include the virtual-twin dataset and integrate biometric sensing (heart rate, skin conductance, pupil dilation) to deepen understanding of emotional resonance across modalities.
Paper Under Review: Affective Translation: Material and Virtual Embodiments of Kinetic Textile Robots. In Proceedings of the Eighteenth International Conference on Tangible, Embedded, and Embodied Interaction (TEI ’26).

Making Room
Textile Robot| Materials: Fabric, wood, electronics, air |Size: 5ft x 3ft x 3ft
Thirsty for Air
Textile Robot | Materials: Fabric, wood, electronics, air. | Size: 5ft x 3ft x 3ft


Waiting for the Dark
Textile Robot | Materials: Fabric, wood, electronics, petg.|Size: 12ft x 6ft x 6ft

Searching for the Sun
Textile Robot | Materials: Fabric, wood, electronics, pla|Size: 5ft x 3ft x 3ft

COWO - BIO MATERIAL RESEARCH
2025
Keywords |bio- materials, sustainable constriction
Team | Berfin Ataman, Lee Marom


COWO is a coconut and wool composite. When combined through a tufting process, these two undervalued waste streams form insulation and acoustic panels without the use of synthetic adhesives. The natural structure of each material allows us to build layered compositions that meet performance requirements while remaining compostable and safe to handle. These panels can be adapted for interiors and modular systems, demonstrating how waste can be reimagined as a reliable, regenerative resource.
We exhibited our COWO coconut- wool panels as a part of the VAMO exhibition at the Venice Architecture Biennale that opened to public in 2025.
Keywords | Underwater Vehicles, Energy Systems, sustainable fuels
Team | Berfin Ataman, Johan Maysonet, JohnByers, Kanglin Kong, Matthew Groll, Ottavia Personeni, Tyler Nagashima, William Cruz
Link to white paper and sponsor draft
CALYPSO
A test Configuration for an Aluminum-Fueled Buoyancy Engine
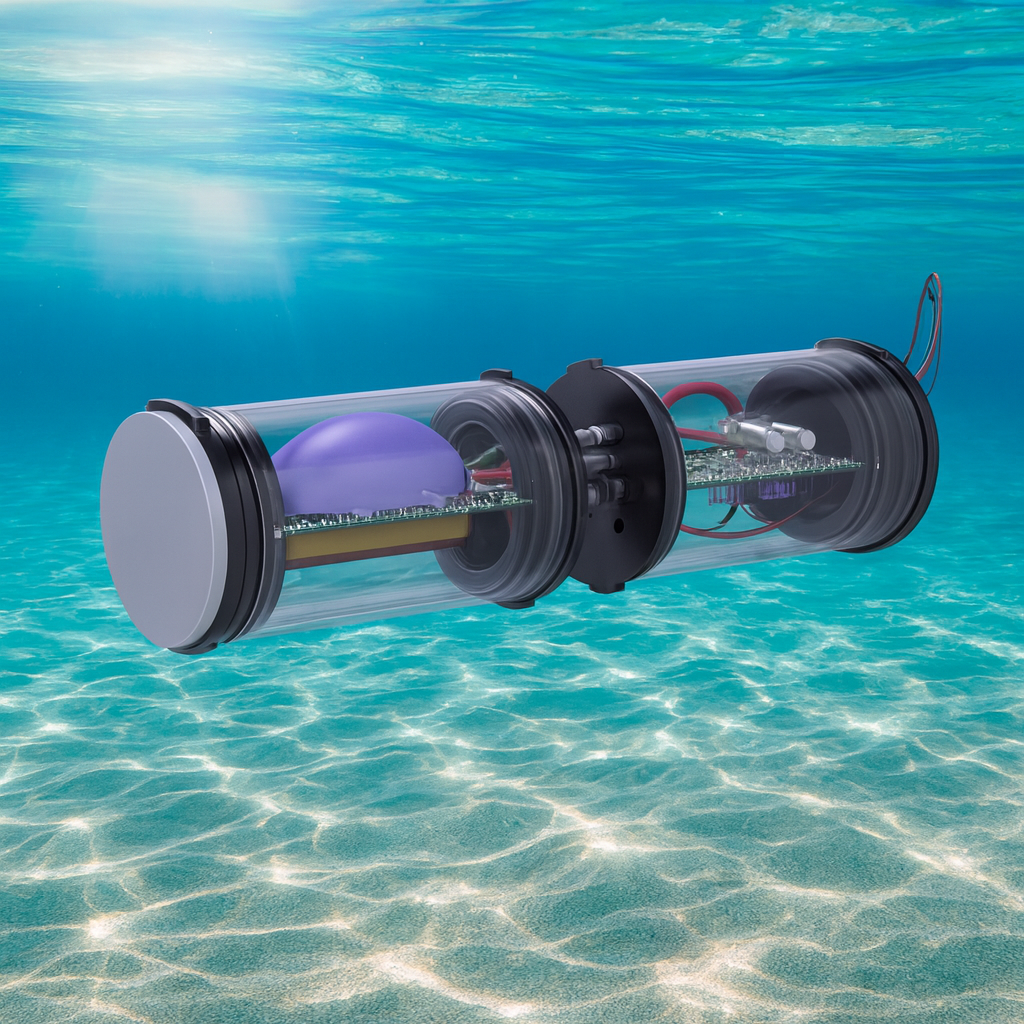
Calypso is a buoyancy engine prototype that explores how chemical reactions can drive controlled motion in underwater environments. The system investigates the feasibility of using the exothermic aluminum–water reaction to produce hydrogen gas and heat as a means of modulating buoyancy without relying on heavy batteries or motorized actuators. When aluminum reacts with water, it releases hydrogen gas that expands a flexible bladder, increasing system volume and decreasing density. Venting the gas reverses the process, allowing the engine to descend. By coordinating injection, venting, and pressure regulation, Calypso creates a repeatable chemical-to-mechanical cycle of ascent and descent. My role in the team was in the design of the hull, aluminum bladder, and was also a part of the electronics and control team.
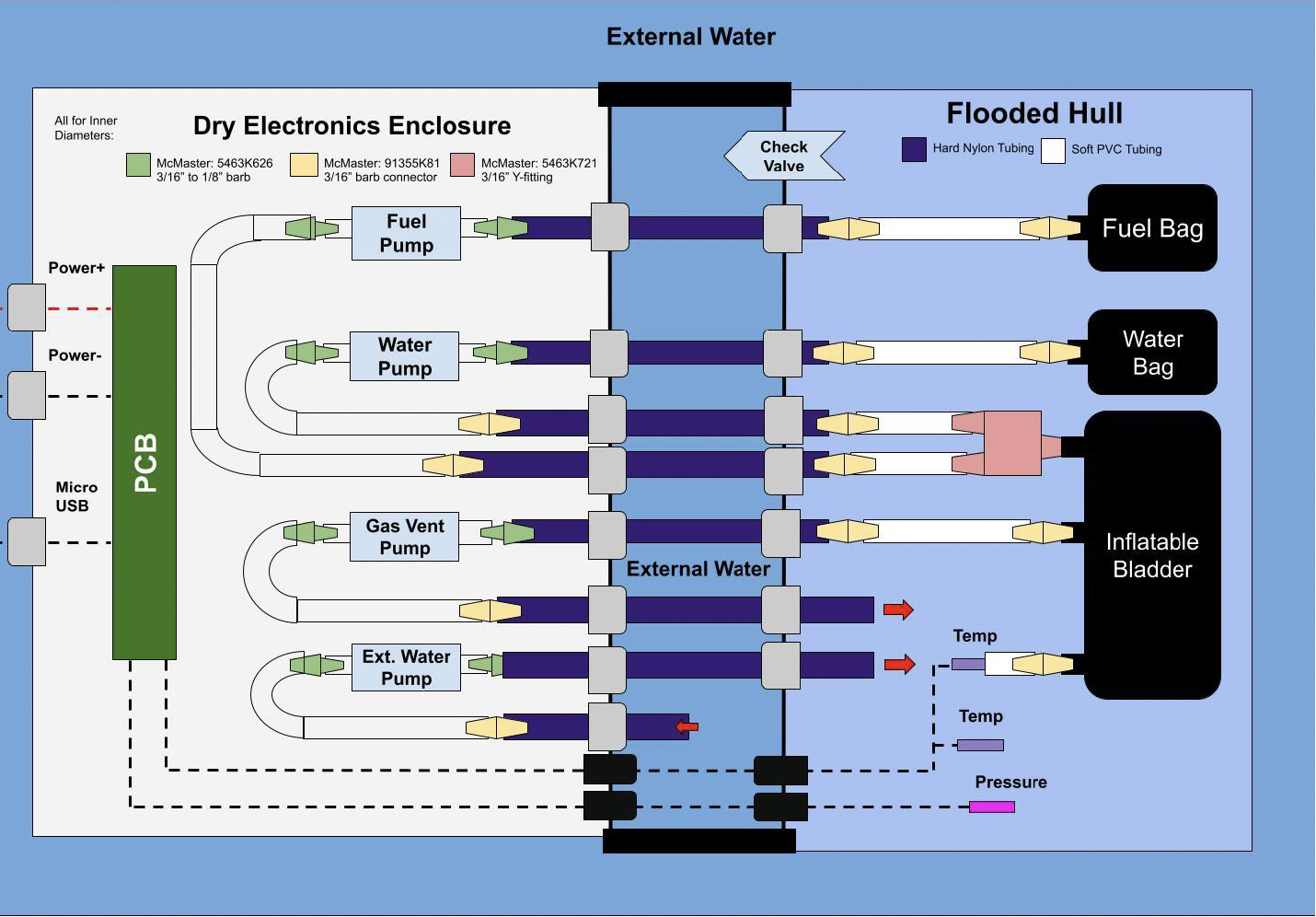
The prototype (above) is built around a dual-housing architecture consisting of a fully flooded hull and a sealed dry electronics enclosure. The flooded hull contains the aluminum fuel bag, water bag, and inflatable bladder, while the dry compartment houses the control electronics, sensors, and pump drivers. The two zones are connected through carefully sealed pass-throughs that maintain waterproofing while routing hard nylon tubing, soft PVC lines, check valves, and Y-junction fittings. This routing network manages water intake, reactant flow, gas venting, and bladder inflation, and its watertight performance was essential to ensuring stable operation under pressure.
To operate the fluid network, Calypso uses a set of custom-designed electronics.These circuits seen above allow the pumps to run reliably inside the underwater shell while isolating all sensitive components in the dry housing. Real-time sensing is handled by pressure and temperature probes whose data feed into a dedicated monitoring interface and a command dashboard that controls ascent, descent, and emergency abort sequences.

The heart of the system is the aluminum fuel bag, designed to contain the reaction while managing heat transfer through the surrounding flooded environment(test setup on the left). Bench-top experiments measured reaction temperature behavior for both aluminum paste and pellet fuels, validating thermal safety and confirming the reaction’s ability to generate more than enough gas to drive meaningful buoyancy change. Modeling and steady-state heat transfer analysis guided the selection of wall thickness and material properties to prevent overheating and ensure predictable inflation behavior.
|||Design Interaction
DISPLACED & CLUSTERS
Kinetic installation| Materials: fabric, wood, electronics, pla| Size: 13ft x 4ftx 4ft
-
Displaced and Clusters (on the next page) are pieces that interact with both their audience and the surrounding environment. The behaviors of the sculptures change based on various inputs. Displaced achieves this through sensors installed in the space where it’s located, while Clusters geolocate their position, collect air pollution data every three hours, and adjuvst their speed according to the air pollution levels.
Displaced is installed in a living space. The Inhabitants of the space have to be conscious of this mobile object in the middle of the room and interact with it. This creates a simple interaction between the inhabitant, the object, and the architectural space. These interactions become more complex as the sculpture’s movements change in response to various inputs from the sensors and data. While making these pieces, I had in mind Gordon Pask’s essays, where he talks about “Architectural Mutualism,” as well as Valentino Braintenberg’s and various cyberneticians’ works.




CLUSTERS
Kinetic installation. Materials: fabric, wood, electronics, pla. Size: 7ft x 3ftx 2ft & 6ft x 3ftx 2ft.
Clusters geolocate their position, collect air pollution data every hour, and adjust their moving speed according to the air pollution levels. They also report their position and can be maintained through wifi.This is an experiment of soft robtos that alter their behaviour according to their enviroment.



||| Installations & Wearables
ISLAND OF DOUBT
-
Context Collapse , Island of Doubt
The little cars Wally, Dory, Mortimer, Ferguson, and Baxter move back and forth in different combinations on the wood curvy tracks. They report their location to the brain of the system that functions as a communication line between all of them. The brain remembers and communicates the position of each sculpture to the other that is in proximity. For instance, when Wally and Dory are the farthest from each other they might realize they miss each other and therefore go into a certain state of behavior that reflects their sadness while if they are closest to each other they might mingle. Once every so often, they move together or towards each other. The tracks never cross so the sculptures can never touch each other unless they are already tangled together, coupled, from the beginning.
When the visitors walk they first see the movement of the fabric sculptures and then realize the tracks. All of the electronics in the ceiling are somewhat hidden because the tracks are designed to blend into the architecture and become an appendage to it. The very complicated system on the ceiling is reflected by not so complicated movements at eye-level. While the tracks blend into the architecture, the vertical sculptures jump out and drool onto the floor as if they are reaching for the audience. The piece facilitates a physical relationship between the architecture and the residents in it.
As the visitors enter the installation and walk through they have to change their behavior in the space according to the sculptures or interrupt the system. They may choose to interrupt the system by pushing the pieces out of their way, pulling them, or just holding them. This physical interruption by the audience interrupts the relationships within the system. Every time the audience chooses to hold one of the sculptures a second more than the sculpture is supposed to stay in that place, the counter in the brain that remembers and reports where the sculptures are or what they are supposed to do next gets interrupted and confused. As a result, the relationships between the objects alter.
In contrast, the audience is also interrupted by the sculptures. When placed in a cramped space where the audience has to walk through the sculpture to get to the other side, visitors that do not want to touch the pieces will have to navigate around the pieces and walk in a zigzag like pattern or get hit by them.
My aim in this project is to investigate relationships between mechanical objects that have physical qualities within a closed system and the system’s relationship to the architecture and the audience. It is a meditation on how two very separate entities like the visitor and the art piece can affect each other physically but not be aware of the unseen consequences that may follow their physical interaction.
RAISING QUILLS
Kinetic sculpture | Materials: fabric, wood, electronics, pla| Size: 9ft x 4ftx 4ft.


I stretch above and below to connect the ends in a new way. They’re a part of me and I of them. I hold out my quills to extend my home. If you and I should share a touch, I would show you the spaces between. I move on my own, not with the wind, not towards the sun, nor do I need water. I contain all within myself. You decide who I am, what I am, where I am from.
METAMORPHOSIS
-
The Metamorphosis focuses on how we understand our bodies and move within space and how we establish a sense of belonging with the built environment and nature through play. The series consists of four wearable pieces that are a part of an interactive installation. The shape of each garment is inspired by children’s play combined with a nature print, and the environments of the installation contain micro or macro images of nature. Visitors are invited to wear the garments and enter the installation. They are encouraged to discover which parts of the installation they blend in with and where they stand out. They get a chance to experience new ways of moving while wearing the garments. Some restrict certain movements while allowing others. The experience urges the wearer to be aware of their movements and the space they inhabit and ponder what it means to become one with nature using our garments the way we move.


